विषय
- व्हील और एक्सल के मैकेनिकल एडवांटेज की गणना
- मैकेनिकल एडवांटेज का उपयोग करके फोर्स की गणना कैसे करें
- कुछ व्हील और एक्सल उदाहरण
आप आमतौर पर एक पहिया और धुरी के रूप में एक पेचकश के बारे में नहीं सोचते हैं, लेकिन यह क्या है। पहिया और धुरा सरल मशीनों में से एक है, जिसमें लीवर, झुके हुए प्लेन, वेज, पुली और स्क्रू शामिल हैं। इन सभी में जो कुछ है वह यह है कि वे आपको उस कार्य को पूरा करने के लिए आवश्यक बल को बदलने की अनुमति देते हैं जिससे आप बल लागू करते हैं।
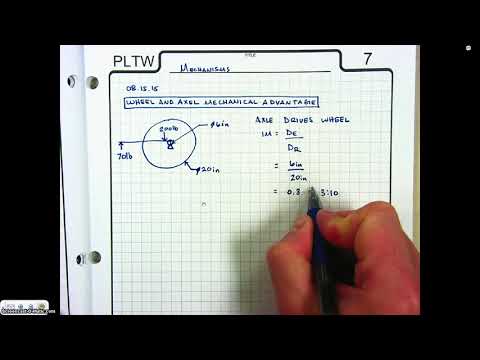
व्हील और एक्सल के मैकेनिकल एडवांटेज की गणना
एक साधारण मशीन के रूप में अर्हता प्राप्त करने के लिए, एक पहिया और धुरा स्थायी रूप से जुड़ा होना चाहिए, और पहिया, परिभाषा के अनुसार, एक बड़ा त्रिज्या है आर एक्सल त्रिज्या की तुलना में आर। जब आप एक पूर्ण क्रांति के माध्यम से पहिया घुमाते हैं, तो धुरा भी एक पूर्ण क्रांति से गुजरता है, और पहिया पर एक बिंदु 2 while_R_ की दूरी तय करता है, जबकि धुरा पर एक बिंदु 2π_r_ दूरी की यात्रा करता है।
काम डब्ल्यू आप एक पूरी क्रांति के माध्यम से पहिया पर एक बिंदु को स्थानांतरित करने के लिए करते हैं जो आपके द्वारा लागू बल के बराबर है एफआर जितनी बार बिंदु आगे बढ़ता है। काम ऊर्जा है, और ऊर्जा को संरक्षित किया जाना चाहिए, इसलिए क्योंकि धुरी पर एक बिंदु एक छोटी दूरी तय करता है, इस पर बल लगा होता है एफआर अधिक होना चाहिए।
गणितीय संबंध है:
W = F_r × 2πr / थीटा = F_R × 2 /R / थीटाकहाँ पे θ कोण है कि पहिया बदल गया है।
और इसीलिए:
frac {F_r} {F_R} = frac {R} {r}
मैकेनिकल एडवांटेज का उपयोग करके फोर्स की गणना कैसे करें
अनुपात आर/आर पहिया और धुरा प्रणाली का आदर्श यांत्रिक लाभ है। यह आपको बताता है कि, घर्षण की अनुपस्थिति में, आपके द्वारा पहिया पर लागू बल को एक कारक के द्वारा बढ़ाया जाता है आर/आर धुरी पर। आप पहिया पर एक बिंदु को एक लंबी दूरी पर स्थानांतरित करके उसके लिए भुगतान करते हैं। दूरी का अनुपात भी है आर/आर.
उदाहरण: मान लीजिए कि आप एक पेचकश के साथ फिलिप्स स्क्रू चलाते हैं जिसमें एक हैंडल होता है जो 4 सेमी व्यास का होता है। यदि पेचकश की नोक का व्यास 1 मिमी है, तो यांत्रिक लाभ क्या है? यदि आप हैंडल पर 5 एन का बल लागू करते हैं, तो स्क्रू पर किस बल लागू होता है?
उत्तर: पेचकश हैंडल की त्रिज्या 2 सेमी (20 मिमी) है, और टिप की 0.5 मिमी है। पेचकश का यांत्रिक लाभ 20 मिमी / 0.5 मिमी = 40 है। जब आप हैंडल पर 5 एन का बल लागू करते हैं, तो पेचकश पेंच पर 200 एन का बल लागू करता है।
कुछ व्हील और एक्सल उदाहरण
जब आप एक पेचकश का उपयोग करते हैं, तो आप पहिया पर एक अपेक्षाकृत छोटे बल को लागू करते हैं, और एक्सल इसे बहुत बड़े बल में बदल देता है। मशीनों के अन्य उदाहरण जो ऐसा करते हैं वे doorknobs, stopcocks, वॉटरव्हील और विंड टर्बाइन हैं। वैकल्पिक रूप से, आप एक्सल के लिए एक बड़ी ताकत लागू कर सकते हैं और पहिया के बड़े त्रिज्या का लाभ उठा सकते हैं। यह ऑटोमोबाइल और साइकिल के पीछे का विचार है।
वैसे, एक पहिया और धुरा का वेग अनुपात इसके यांत्रिक लाभ से संबंधित है। विचार करें कि धुरी पर "a" पूर्ण क्रांति करता है (2r_r_) उसी समय है जब पहिया पर बिंदु "w" एक क्रांति करता है (2π_R_)। बिंदु का वेग वीए 2 is_r_ / हैटी, और बिंदु का वेग वीw 2 is_R_ / हैटी। डिवाइडिंग वीw द्वारा वीए और सामान्य कारकों को समाप्त करने से निम्नलिखित संबंध बनते हैं:
frac {V_w} {V_a} = frac {R} {r}उदाहरण: यदि पहियों का व्यास 24 इंच है तो कार को 50 मील प्रति घंटे की गति पर जाने के लिए 6 इंच की कार धुरी को कितनी तेजी से घूमना पड़ता है?
उत्तर: पहिया की प्रत्येक क्रांति के साथ, कार 2R_R_ = 2 × 3.14 × 2 = 12.6 फीट की यात्रा करती है। कार 50 मील प्रति घंटे की यात्रा कर रही है, जो 73.3 फीट प्रति सेकंड के बराबर है। इसलिए, पहिया 73.3 / 12.6 = 5.8 क्रांतियों को प्रति सेकंड बनाता है। चूँकि पहिया और एक्सल प्रणाली का यांत्रिक लाभ 24 इंच / 6 इंच = 4 है, इसलिए एक्सल बनाता है प्रति सेकंड 23.2 क्रांतियाँ.